
27 Vector Spaces
In the introduction, we discussed the modern understanding of linear systems as vector spaces. To begin with, let us formally define a vector space accompanied with axioms.
Definition. (Vector Space)
A vector space} is a set  upon which the operations, addition} and scalar multiplication} are defined, subject to the following axioms:
upon which the operations, addition} and scalar multiplication} are defined, subject to the following axioms:
For all  , and for all scalars
, and for all scalars  ,
,
 is a group.
is a group.




Do you get a sense of what a vector space is? In fact, the notion of vector space is quite familiar to us, but we often did not adapt the vector space perspective. Let us think of a 2-dimensional  –
– Cartesian coordinate system. It is interesting to see any coordinate
Cartesian coordinate system. It is interesting to see any coordinate  can be seen as a vector space spanned by
can be seen as a vector space spanned by  and
and  . That is,
. That is,
![\[ \mathbb{R} \times \mathbb{R} = \mathbb{R}^2 = \mathrm{Span}\lbrace \vec{e_x},\vec{e_y}\rbrace =\left\lbrace \begin{pmatrix} x\\ y \end{pmatrix} = x\begin{pmatrix} 1\\ 0 \end{pmatrix} + y\begin{pmatrix} 0\\ 1 \end{pmatrix}: x,y\in \mathbb{R} \right\rbrace\]](https://iu.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-c67f75477a4a9fae6b8bfcb6269b9ce8_l3.png "Rendered by QuickLaTeX.com")
Euclidean Space 
The example we discussed was the – Cartesian coordinate system in the light of 2-dimensional vector space, i.e.  . In fact, this can be expanded to the ––
. In fact, this can be expanded to the –– Cartesian coordinate system or a 3-dimensional vector space
Cartesian coordinate system or a 3-dimensional vector space  , and generalized to
, and generalized to  -dimensional vector space
-dimensional vector space  for
for  , though not easily visualizable. We call this a Euclidean space. For intuitive exploration, we limit our focus to low-dimensional spaces such as
, though not easily visualizable. We call this a Euclidean space. For intuitive exploration, we limit our focus to low-dimensional spaces such as  and in this summary.
and in this summary.
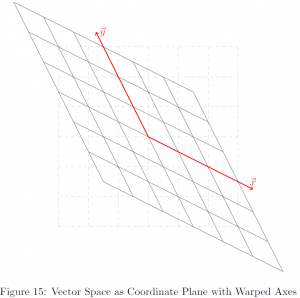
Let us reconsider the example  . The vectors in the spanning set coincided with the unit vector on – and -axis, respectively. However, it need not be a case. That is, so long as at least two vectors of non-zero magnitude with non-zero angle are included in the set, the set can span the whole . Let us illustrate with an example.
. The vectors in the spanning set coincided with the unit vector on – and -axis, respectively. However, it need not be a case. That is, so long as at least two vectors of non-zero magnitude with non-zero angle are included in the set, the set can span the whole . Let us illustrate with an example.
Example. Show that  , where
, where  .
.
Expressing  in a parametric vector form, we have, for all
in a parametric vector form, we have, for all 
![\[ x\begin{pmatrix} \cos\theta\\ \sin\theta \end{pmatrix}+ y\begin{pmatrix} 1\\0 \end{pmatrix} = \begin{pmatrix} x\cos\theta +y\\ x\sin\theta \end{pmatrix}\]](https://iu.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-7651deb94a9914e879574e9089697f05_l3.png "Rendered by QuickLaTeX.com")
Let  , and choose
, and choose  .
.
Then, there exists such that  .
.
Therefore,  .
.
Now, choose  .
.
Then, there exists such that  .
.
Therefore,  .
.
We omit the rest of the proof, and conclude , where .
Though we have not provided a complete proof, we believe the reader, at least intuitively, saw the possibility of spanning the whole given 2 vectors of not a scalar multiple of each other. Also, note that the continuity or the completeness axiom of  is embedded in our proof.
is embedded in our proof.
Subspace
Now, we move onto subspace, a subset of a vector space. Formal definition is as follows:
Definition. (Subspace)
Given a vector space , a subspace  is a subset of such that
is a subset of such that

- is closed under addition
- is closed under scalar multiplication
In short, a subspace can be thought of a subset of a vector space containing the origin, denoted by  . However, note that a subspace is defined on the space of the same dimension. That is,
. However, note that a subspace is defined on the space of the same dimension. That is,
![\[\mathbb{R}^m \not\subset \mathbb{R}^n \text{ for any } m\neq n\]](https://iu.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-ad508dacdc5d148f9cc06d67a1deef46_l3.png "Rendered by QuickLaTeX.com")
For example, a subset  is essentially an – plane, yet is defined on , and thus a subset of . Again, in fact,
is essentially an – plane, yet is defined on , and thus a subset of . Again, in fact,  .
.
Null Space and Column Space
We shall conclude this chapter introducing 2 other important concepts, null space and column space. In short, a null space is a set of solutions where  . That is,
. That is,
Definition. (Null Space)
For a linear system  , the null space of
, the null space of  is
is
![\[ \mathrm{Nul}(A) = \left\lbrace \vec{x}:A\vec{x}=0 \right\rbrace\]](https://iu.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-3e6994e2db4d353e09546026d44800d1_l3.png "Rendered by QuickLaTeX.com")
Column space is another term for a spanned set whose element is every column of a given matrix. That is,
Definition. (Column Space)
The column space of  is
is
![\[ \mathrm{Col}(A) =\mathrm{Span} \left\lbrace \vec{c_1}, \vec{c_2}, \cdots, \vec{c_j}\right\rbrace\]](https://iu.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-888d68b93cddfbc5f467596cb4db9f84_l3.png "Rendered by QuickLaTeX.com")
Let us illustrate with an example.
 .
.1. 
Let us row-reduce the augmented matrix of . Then,

Therefore, there only exists a trivial answer  , where
, where  .
.
Therefore,
![\[ \mathrm{Nul}(A) = \vec{0}\]](https://iu.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-fc43340c120080b2924d509078c33ff8_l3.png "Rendered by QuickLaTeX.com")
2. 
By definition,

Therefore,  and
and  .
.
Note that both and are subspaces of  , while the null space is implicitly defined, and the column space explicitly. Also, note that is in fact equivalent to the kernel of the given linear transformation. Recall the definition of kernel is a collection of elements whose image is an identity element in the range, in this case .
, while the null space is implicitly defined, and the column space explicitly. Also, note that is in fact equivalent to the kernel of the given linear transformation. Recall the definition of kernel is a collection of elements whose image is an identity element in the range, in this case .